Sustainable Fishing Exhibit
Cornerstone Engineering Design Project focused on marine sustainability.


Project Overview
For my engineering design course at Northeastern University, my team was challenged to create an interactive museum exhibit that would teach visitors about sustainable fishing practices. The goal was to make a complex environmental topic accessible and engaging for a general audience, particularly younger visitors who might not have prior knowledge of ocean conservation. We needed to design something that was both educational and entertaining—striking a balance between scientific accuracy and user experience.
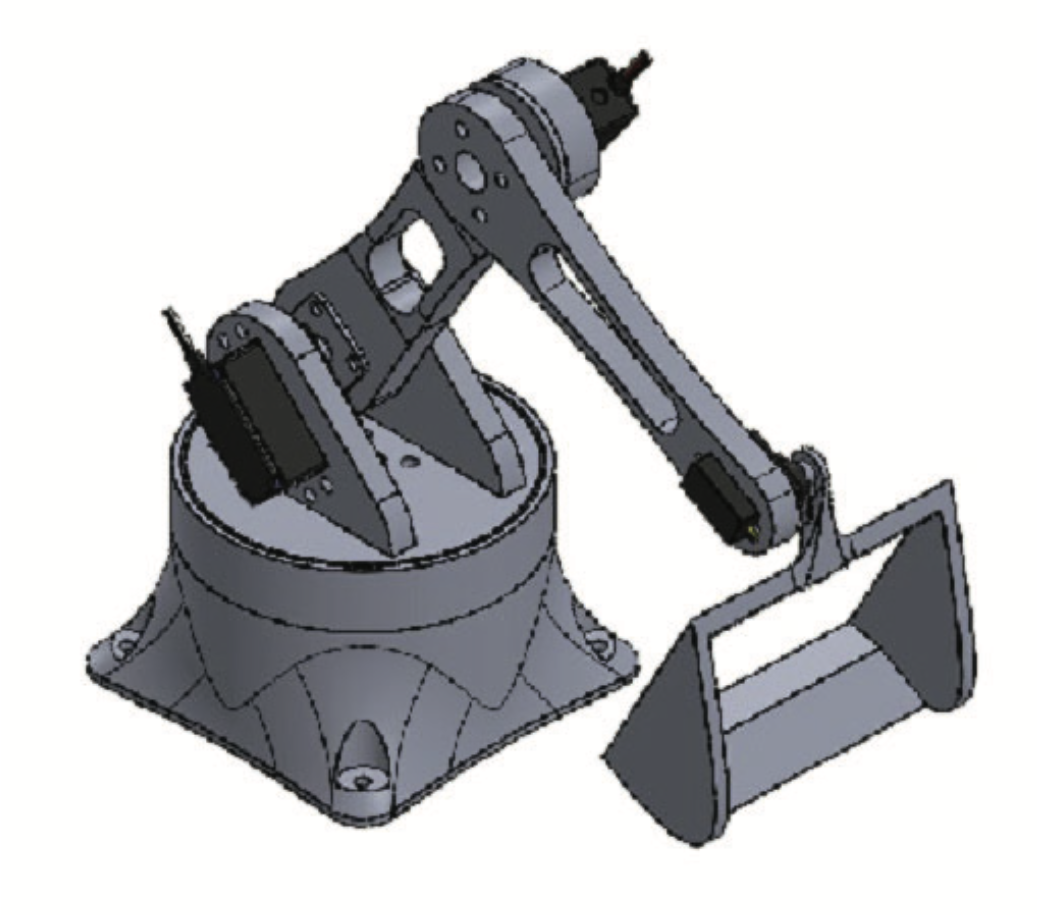
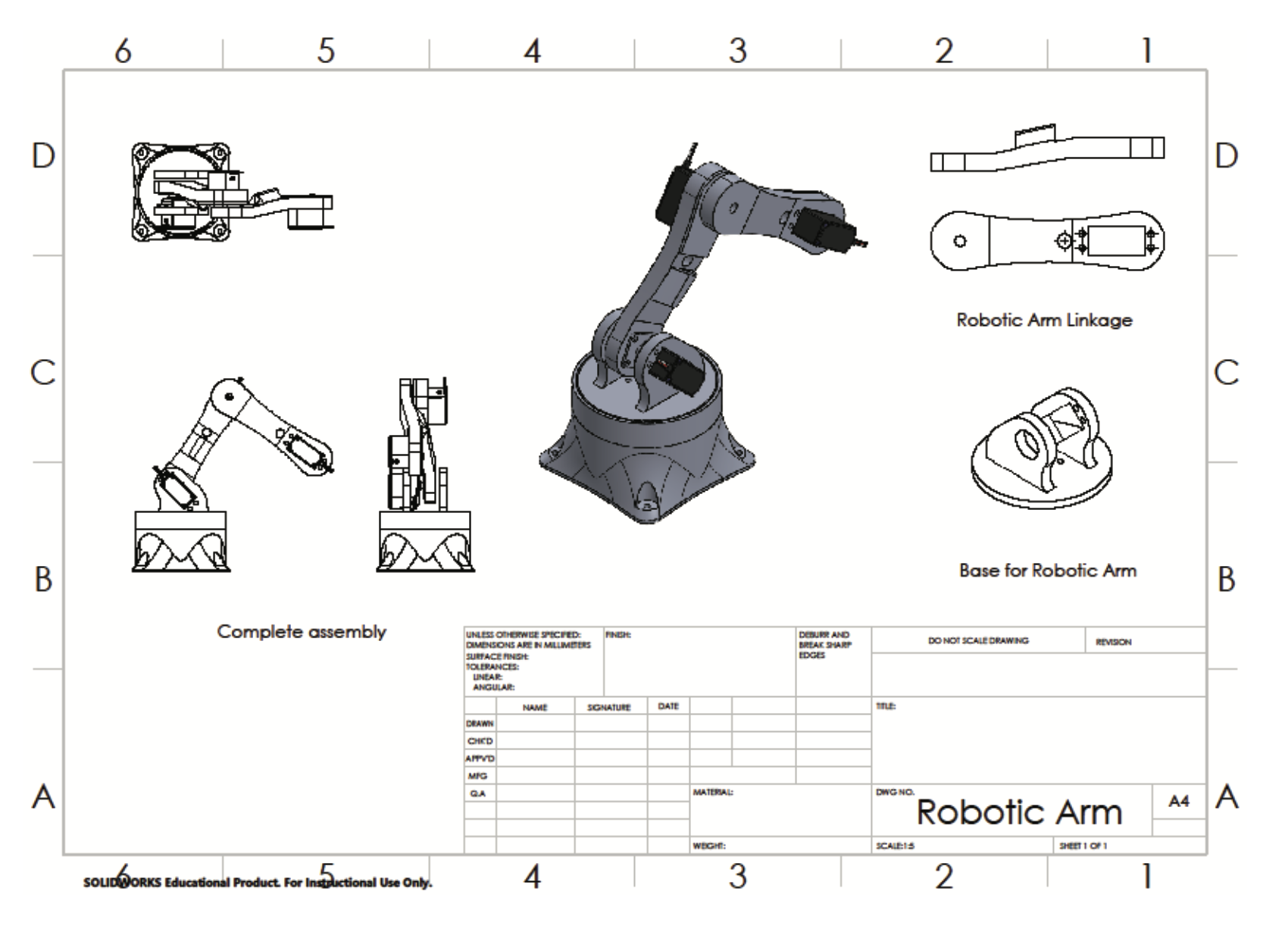
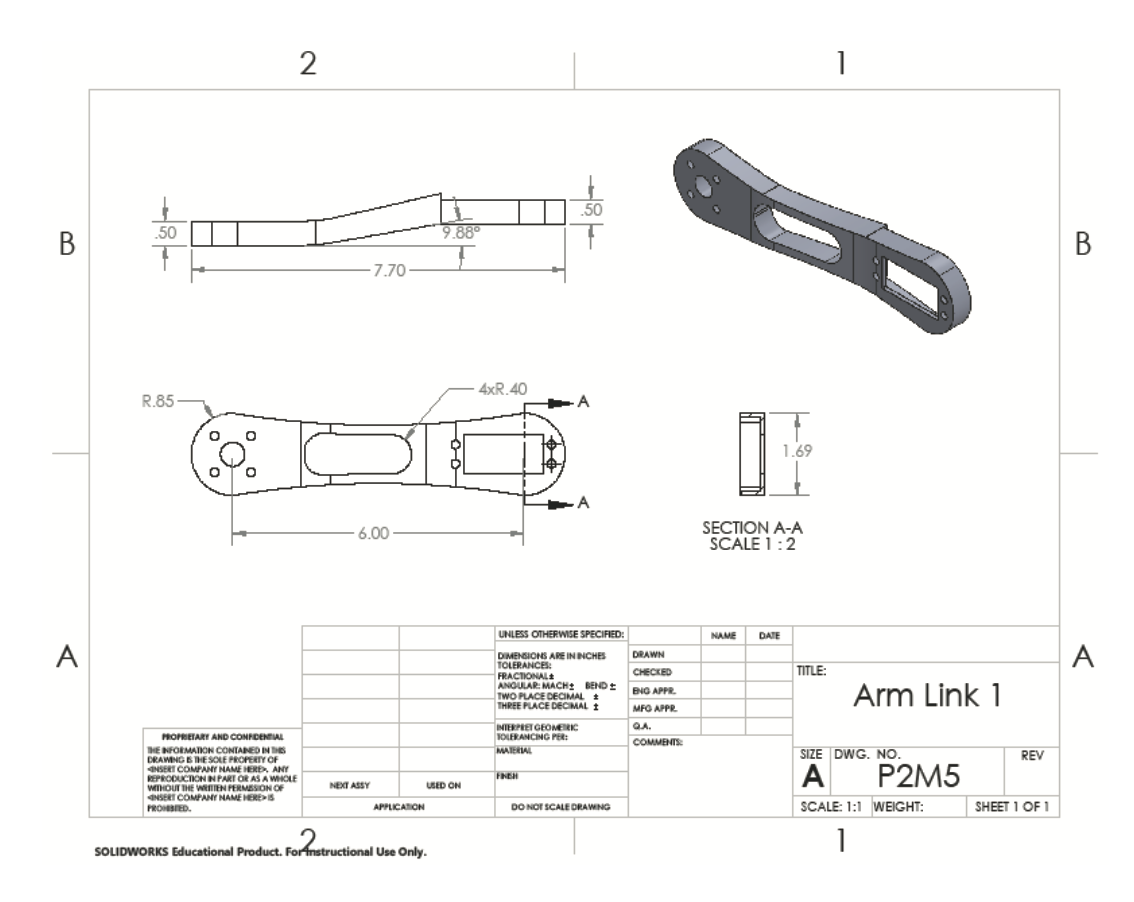
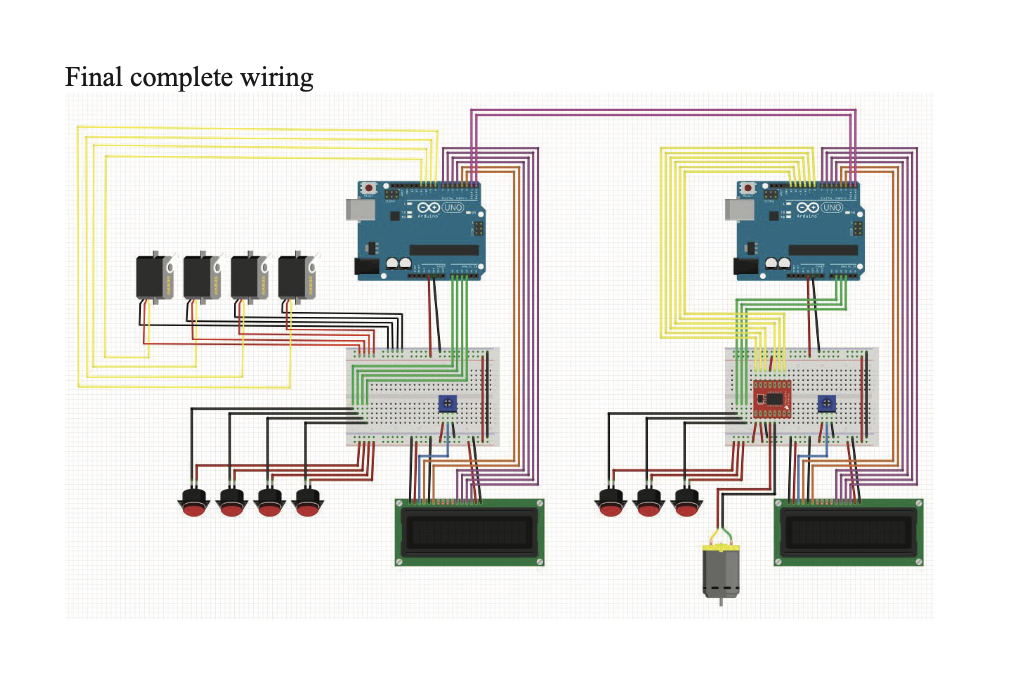
We designed and built a robotic arm exhibit that simulated fishing scenarios to demonstrate sustainable practices. I worked on integrating multiple servos to control the arm's movement and coordinating with teammates on the electronics and programming. The biggest challenge we faced was durability—the servos couldn't handle extended operation and several burned out during testing. We also had a structural issue where the base servo broke, causing the arm to wobble and sometimes tip over. These reliability problems meant the exhibit needed constant maintenance to keep running. We had to balance our ambitious design goals with the reality of our budget and timeline, making compromises on component quality that came back to bite us later.
Despite the technical setbacks, the exhibit succeeded where it mattered most: connecting with users. During our public exhibitions, we collected feedback showing an average fun rating of 4.64 out of 5 and an average complexity rating of 1.27 out of 5 (where 1 meant simple and easy to understand). Visitors consistently gave positive feedback about how the exhibit made sustainable fishing concepts approachable and memorable. The project taught me that user experience sometimes matters more than technical perfection—people forgave the occasional malfunction because the core idea resonated with them. It also reinforced an important lesson about designing for reliability from the start rather than trying to patch problems later.
Abstract
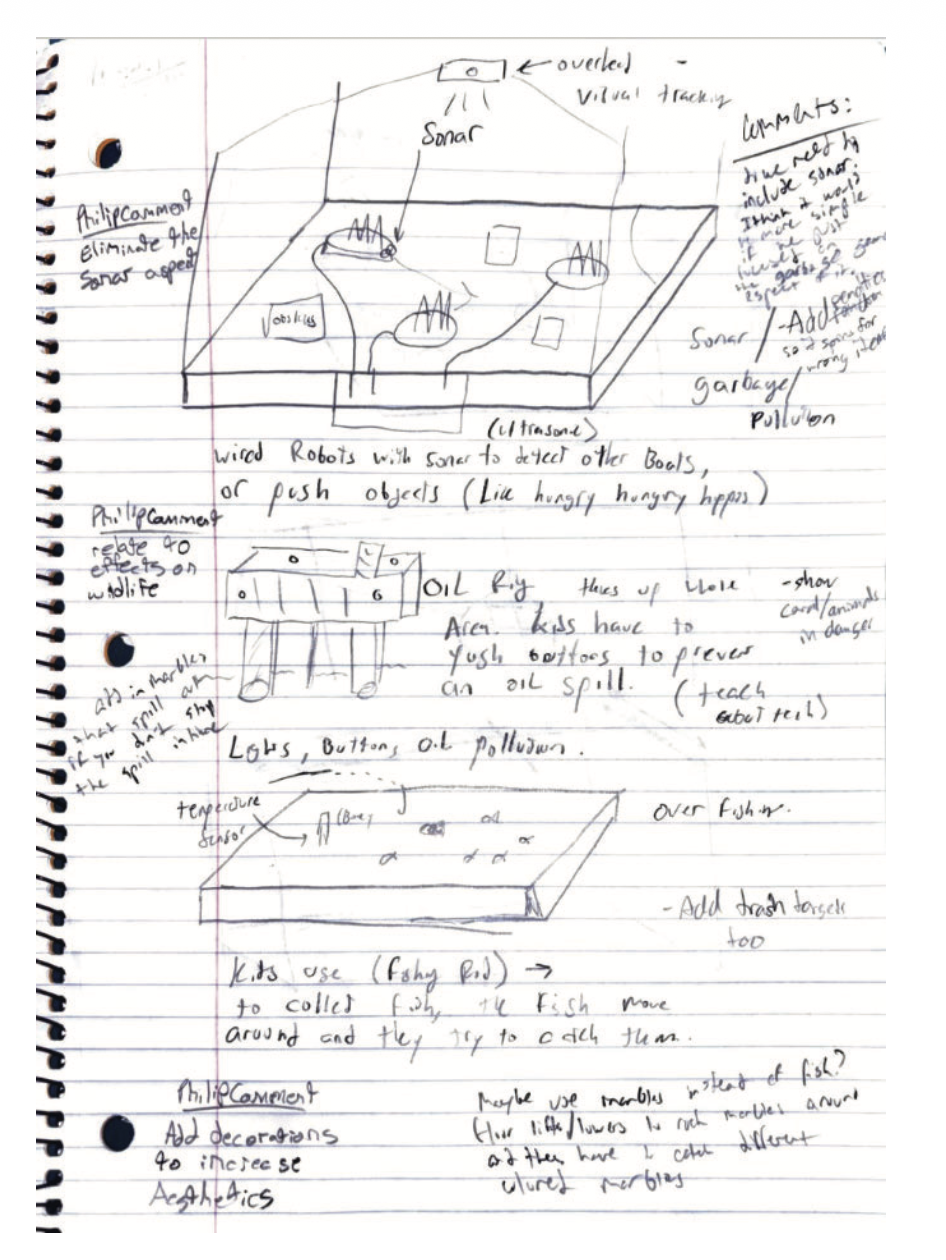
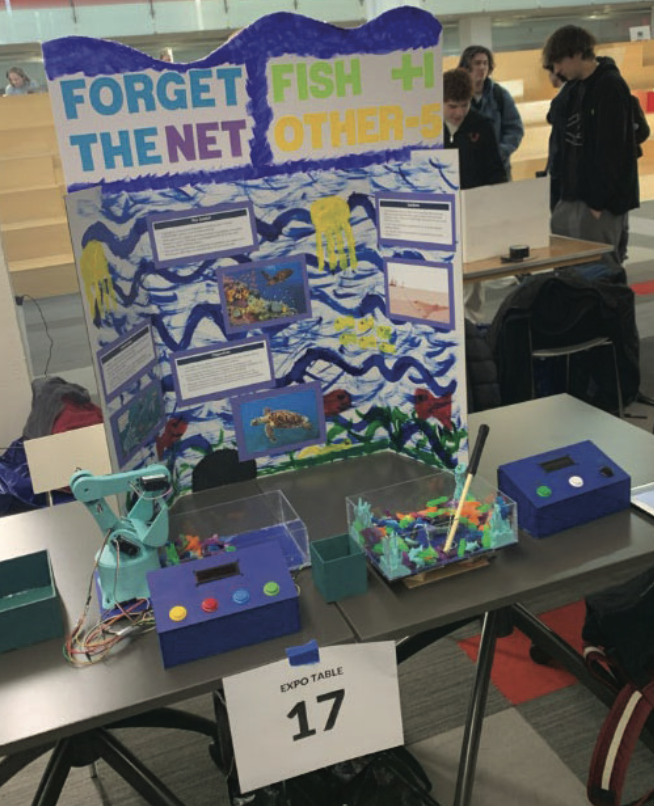
The purpose of this report is to describe in detail the engineering design processes that went into the creation of a prototype traveling STEM exhibit about the environmental effects of bottom trawling, and to evaluate the results of said prototype. This prototype was created with the intention of offering children in rural areas an opportunity to learn about relevant STEM topics, as part of a traveling ocean sciences museum. With that in mind, the team designed an exhibit that focused on using interactivity to communicate the main messages about sustainable fishing. To avoid overcomplicating the exhibit, the team created two main interactive features: a robotic net, and a magnetic fishing rod. Users competed against each other by using these features to try to catch as many fish as possible out of two separate acrylic boxes that were each filled with plastic fish and 3D printed dolphins. Then, users input the number of fish and dolphins that they caught into their consoles, and their scores were calculated. Even though the robotic arm almost always caught more fish, the player controlling it would lose points for catching dolphins, and therefore would end up with fewer total points than the player controlling the fishing rod. This communicates the real-world differences between trawling and more sustainable methods like rod-and-line fishing: trawling bycatch harms dolphin populations, while rod-and-line fishing is more selective and rarely experiences bycatch. The prototype also exceeds all user requirements. We have 6 Spark Fun interactive components, 1 of which is split into 4 connected sub-components. We also have 21 3D printed components (12 dolphins, 4 corals, and 5 connected parts for the robot arm).
In terms of function, the prototype meets the team’s goals in almost all areas. The main reason that it fell short was in operating consistently for an extended duration. Each component of the exhibit was able to work for a limited period of time, but several required high levels of maintenance in order to continue operating. The main culprits are the servos in the robot arm; leaving them running for too long blew out several servos over the course of development. We also ran into an issue where the base servo broke and would not allow the arm to connect solidly to it, causing the arm to wobble and occasionally fall over. On the other hand, the design succeeded in the most important area: presenting the topic of sustainable fishing to the users in a way that is easy to understand, fun, and highly relatable. This is evident in the feedback we received from users during our exhibitions: the average rating for our design’s fun factor was 4.64 out of 5, the average rating for the design’s complexity was 1.27 out of 5 (with 1 being the most simple and easy to understand), and user feedback was almost entirely positive.
← Back to Home